産業用機器・設備FA・ロボット
当社はカワサキロボットの代理店として長い歴史と国内No.1の販売実績を持ち、あらゆる業界に向けて様々な提案を行っております。各システムインテグレータ(SIer)様とのネットワークを活かしたエンジニアリング対応が強みであり、導入後のアフターサービスまで、当社は一貫した対応と提案を迅速にお届けします。
主要販売業界
- 半導体業界
- 電機・電子業界
- 自動車業界
- 物流・搬送業界
- 食品業界
- 樹脂成形品業界
- 鋳物業界
- その他あらゆる業界
お問い合わせ窓口
(FA・ロボット)FA・システム本部
(DANBOT)
FA・システム本部 営業二部
TEL:078-333-4355
(ケズルーノ)
中部本部 名古屋営業所二課
TEL:052-586-7271
双腕スカラロボット
代表的な用途
ハンドリング、組立、箱詰め、ネジ締め、シーリング




duAroシリーズ
カワサキの人協働型双腕ロボットduAroは、電気・電子から食品業界まであらゆる産業の人手不足を「簡単設置・簡単教示」により解消いたします。
小・中型汎用ロボット
代表的な用途
ハンドリング、組立、研磨・バリ取り、シーリング

Rシリーズ(最大可搬質量3Kg-80Kg)
カワサキロボットの小・中型汎用マニピュレータとなるRシリーズは、組立、ハンドリング、シーリングをはじめ、クリーンルーム対応、食品対応と多くの現場で自動化・省力化に力を発揮いたします。
大型汎用ロボット
代表的な用途
ハンドリング、組立、研磨・バリ取り、フリクションスポット接合、シーリング、スポット溶接


Bシリーズ(最大可搬質量100Kg-300Kg)
カワサキロボットの大型汎用マニピュレータとなるBXシリーズは、広い動作範囲と長いリーチ、手首の大きな動作角で、スポット溶接や組立、ハンドリング作業を素早くこなします。腰周りサイズの小型化、ケーブル内蔵機能により小スペース設置が可能です。

CXシリーズ(最大可搬質量110Kg-210Kg)
最高速重視のセッティングにより、特にハンドリング適用など比較的長いストロークの動作に適したロボットです。
超大型汎用ロボット
代表的な用途
組立、研磨・バリ取り、ロード・アンロード、ハンドリング、シーリング

Mシリーズ(最大可搬質量350Kg-1,500Kg)
カワサキロボットの超大型汎用マニピュレータとなるMシリーズは、最大可搬質量1,500kg(MG15HL)の能力を備えて、自動車製造工程間のボディ搬送や大型治具のハンドリング、大型家電製品や石物、建材などのハンドリングに力を発揮します。
クリーンロボット
代表的な用途
クリーンルーム

NTSシリーズ

TTSシリーズ
一台のロボットで2FOUPから3FOUPまでのEFEMに走行装置なしで対応可能で、カワサキ独自の駆動機構により高精度・高剛性な動作を実現しています。 さらに、TTSシリーズでは上下軸にテレスコピック機構を採用し、低い最低パスラインと高い位置への運搬を両立しています。
防爆塗装用ロボット
代表的な用途
塗装


Kシリーズ(最大可搬質量5Kg-20Kg)
カワサキロボットの防爆仕様塗装用マニピュレータとなるKシリーズは、携帯電話 のような小型ワークの塗装から、塗装機器をアームに内蔵し、自動車の内外板塗装に適した大型マニピュレータまで、豊富な経験とラインアップを誇ります。塗装パッケージセルも各種取り揃えております。
パレタイズロボット




CPシリーズ(最大可搬質量180Kg-700Kg)
カワサキの新型パレタイズロボットCPシリーズ は長い経験に基づいた高性能なパレタイズロボットです。動作範囲が広く、スピードが速いためタクトタイムの短縮を実現し、物流のスピードアップに威力を発揮します。

RDシリーズ(最大可搬質量80Kg)
RD80 はコンパクトでスリムなパレタイズロボットです。小物のパレタイズや狭い現場での作業に最適です。
高速ピッキングロボット
代表的な用途
組立、ロード・アンロード、ハンドリング


Yシリーズ
デルタ型パラレルリンクを採用する高速ピッキングロボットYシリーズは、食品・薬品・化粧品をはじめ、電気・電子機械部品の組立、整列など、様々な用途で生産ラインのスピードアップを実現します。
アーク溶接用ロボット
代表的な用途
アーク溶接


BAシリーズ
新型アーク溶接用ロボット。スポット溶接で定評のある大型Bシリーズの優れた手首中空構造を採用。トーチ周りのケーブルのとり回しが容易になり、ワイヤ送給装置やケーブル類の処理を容易にし、安定した溶接ワイヤの送給を実現すると共にオフラインでの検討も容易になりました。

RAシリーズ
カワサキのアーク溶接ロボットなら導入したその日から、熟練者並みの力を発揮します。
スポット溶接用ロボット
代表的な用途
組立、研磨・バリ取り、ロード・アンロード、フリクションスポット接合、ハンドリング、シーリング、スポット溶接


Bシリーズ(最大可搬質量100Kg-300Kg)
カワサキロボットの大型汎用マニピュレータとなるBXシリーズは、広い動作範囲と長いリーチ、手首の大きな動作角で、スポット溶接や組立、ハンドリング作業を素早くこなします。腰周りサイズの小型化、ケーブル内蔵機能により小スペース設置が可能です。
医療・医薬用ロボット
代表的な用途
組立、ロード・アンロード、ハンドリング、クリーンルーム

MS005N
製薬・医療の現場では人手による作業ミスや微生物の混入などのリスク、または抗ガン剤などの高薬理活性医薬品を取り扱うことによる人体への曝露リスクなどを避けるため、ロボットによる自動化が求められています。MS005Nはこれらの期待に応えるために開発されたメディカル用ロボットで、特に高度な除菌環境での使用に適したVHP(過酸化水素ガス)除菌対応の表面が平滑で耐腐食性の高いステンレス製ロボットです。
DANBOT



段ボールケース用パレタイジングシステム「DANBOT」
段ボール工場で生産される様々な段ボールケースを各種パターンでパレットに積み込む工程の自動化は、 段ボール工場における生産性向上のキーポイントの一つです。
DANBOTは産業用ロボットの総合メーカーである川崎重工業のロボット制御技術と適用ノウハウを活用し、 開発された段ボールケース専用のロボットパレタイジングシステムです。
結束済みA式ケース用のDANBOT-Aと、打ち抜きケース用のDANBOT-Xのラインアップにて、全国の段ボール工場の現場で、生産性と品質の向上に貢献しております。

※DANBOTは川崎重工業の登録商標です。
段ボールケース用パレタイジングシステム「DANBOT®」
「DANBOT」は産業用ロボットメーカーであるカワサキがロボットの制御技術および適用ノウハウを活用して開発した段ボールケース専用のロボットパレタイジングシステムです。
「DANBOT」には、結束済A式段ボールケース用のDANBOT-A(E、Fの2シリーズ)と、ラップラウンドケース用のDANBOT-Xがあり、全国の段ボール工場の現場で生産性と品質の向上に貢献しています。
結束済A式段ボールケース用「DANBOT-A」
標準レイアウト
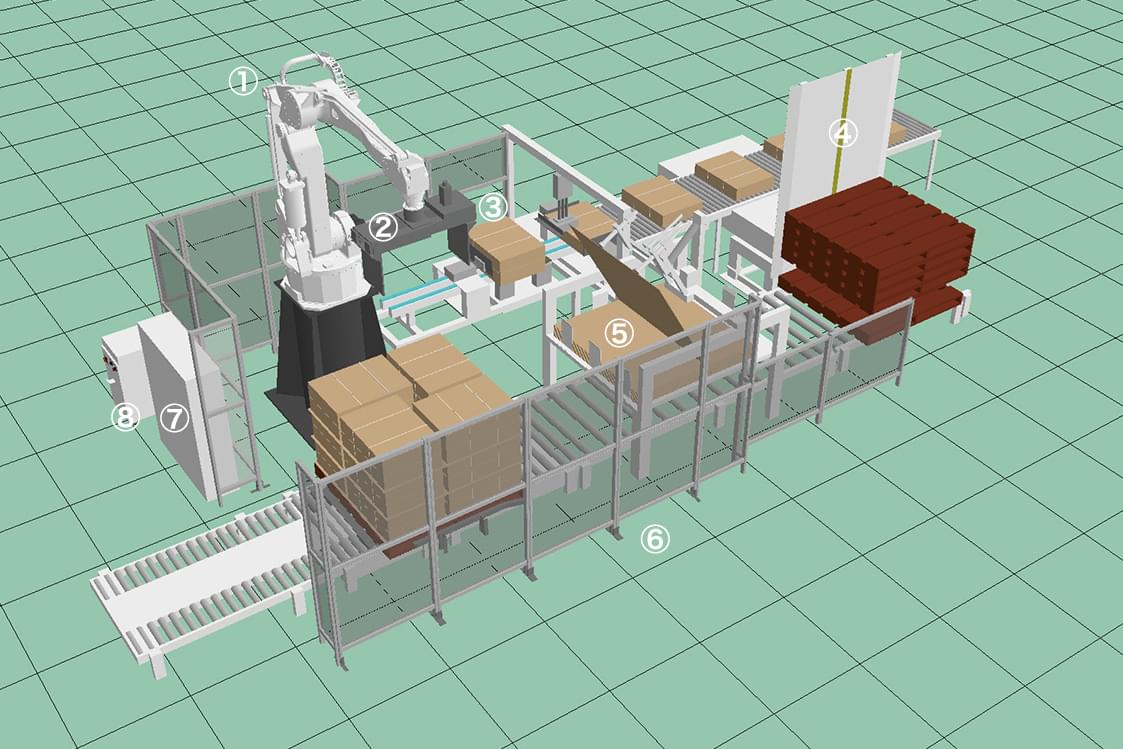
装備一覧
- ロボット本体
- パレタイズ用ハンド
- 段積み装置
- パレットマガジン
- 合紙供給装置
- 安全柵
- DANBOT制御盤
- ロボットコントローラ
標準仕様
Eシリーズ
115インチ以上のFFG向けを主対象にしたシステムで、250~300枚/分に能力があります。持上げ方式の段積み装置により、大判のケースでも安定した積み付けを実現いたします。素通し・無結束ケースシートのパレタイズも可能です。
| 型式 | A300E-100 | A250E-115 | A250E-125 | |
|---|---|---|---|---|
| 処理能力(枚/分) | 300 | 250 | 250 | |
| 対応寸法(mm) | Min. | W220×L320 | W250×L320 | W250×L320 |
| Max. | W1,200×L1,250 | W1,500×L1,500 | W1,500×L1,600 | |
| 最大可搬重量(kg) | 25 | |||
| 最大積付高さ(mm) | パレット上:2,200 | |||
| 所要電源(KVA) | 20(標準仕様部) | |||
| エアー消費量 | 600L/mm.(0.69MPa(7kgf/cm²G)) | |||
| 適用パレット寸法(mm) | Max.W1,800×L1,500 ~ Min.W1,000×L1,000 | |||
Fシリーズ
Eシリーズをベースにさらに高速化を図り、最大400枚/分の能力があります。
| 型式 | A350/400F-84 | A350/400F-100 | A350F-115 | |
|---|---|---|---|---|
| 処理能力(枚/分) | 300/400 | 350/400 | 350 | |
| 対応寸法(mm) | Min. | W250×L320 | W250×L320 | W250×L320 |
| Max. | W1,000×L1,050 | W1,220×L1,250 | W1,600×L1,500 | |
| 最大可搬重量(kg) | 25 | |||
| 最大積付高さ(mm) | パレット上:2,200 | |||
| 所要電源(KVA) | 20(標準仕様部) | |||
| エアー消費量 | 600L/mm.(0.69MPa(7kgf/cm²G)) | |||
| 適用パレット寸法(mm) | Max.W1,800×L1,500 ~ Min.W1,000×L1,000 | |||
標準装置・機能
段積み装置
持上げ方式により、一度により多くの段ボールケースをロボットに渡すことを可能とし、段ボールケースを傷つけることなくケース束を積み重ねる事ができます。

Eシリーズ専用

Fシリーズ専用
合紙・敷紙供給装置

Eシリーズ専用

Fシリーズ専用
専用ハンド
結束済みA式段ボールケースの搬送に適したハンドを採用しています。挟み込む機構に加えて、ハンド下部にある突起がワークを確実に把持します。

A式用ハンド
パレットマガジン
上流機からの生産データに基づき、自動でパレットを供給いたします。

パレットマガジン
ライン自動化をサポートする専用ソフト
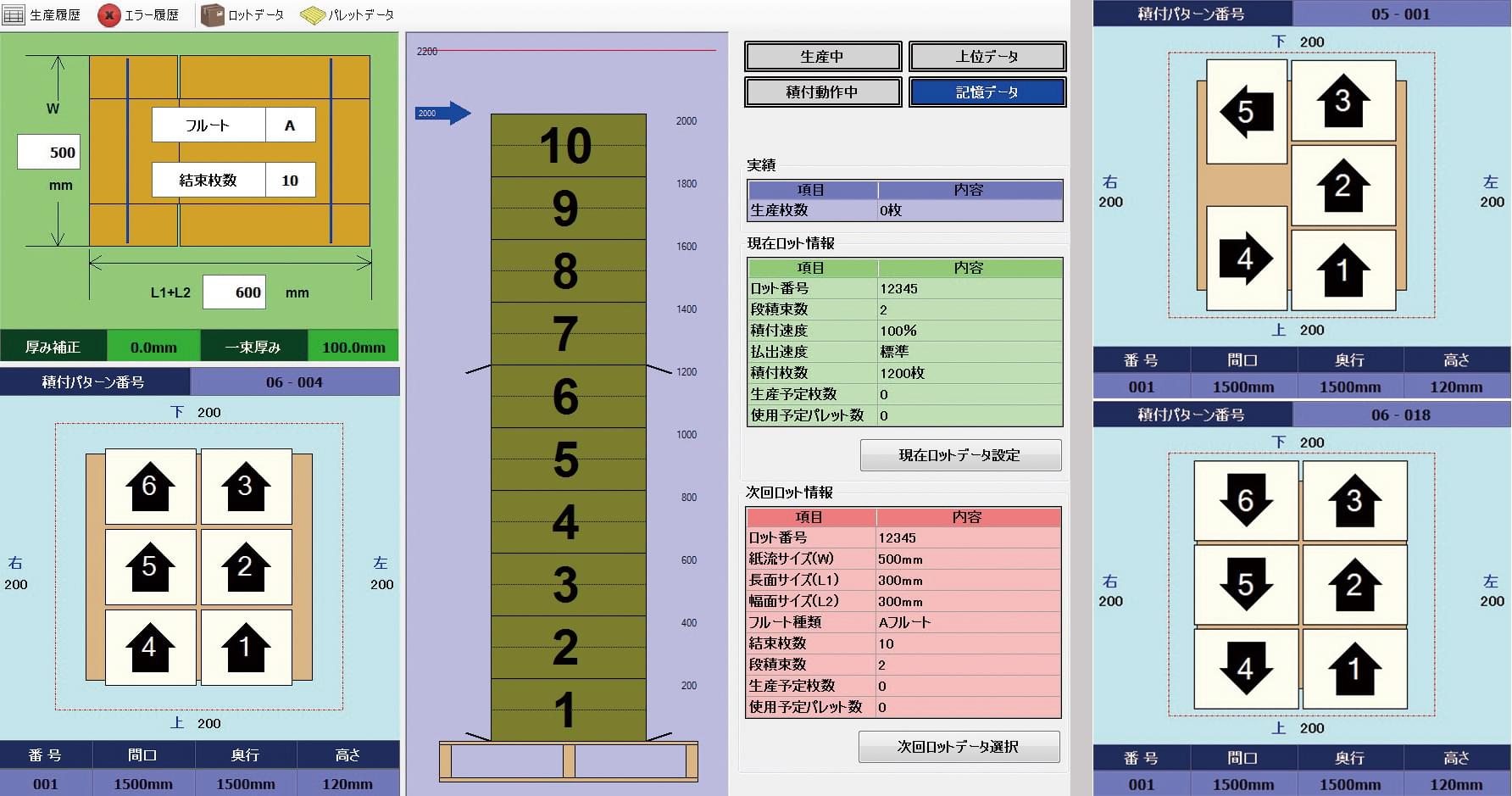
DANBOTパソコン画面/積パターン選択例
オペレーターが各種寸法をセットしたり、積みパターンの入力/選択する作業は必要ありません。DANBOT専用ソフトは上流機のCNCまたは管理装置とデータリンクし、必要な情報を自動で入手します。 上流機に合わせたロット替えを自動で行い、また上流機からのケースデータに基づき積載効率が良く、荷崩れしにくい積みパターンを自動選択いたします。
オプション
積付隙間矯正ロボット
パレタイズ時にできるケース間の隙間をパレタイズエリア内の2台のロボットで矯正します。出荷場での積載効率の向上・荷崩れ防止に発揮します。

積付隙間矯正ロボット
合紙・敷紙供給ロボット
ロボットを採用することで、ラインの処理速度向上のほか、合紙・敷紙を正確に敷くことができます。

合紙・敷紙供給ロボット
ラップラウンドケース用「DANBOTーX」
標準レイアウト

装備一覧
- ロボット本体
- パレタイズ用ハンド
- パレットマガジン
- 安全柵
- DANBOT制御盤
- ロボットコントローラ
- ケース揃え装置
- べニアストックテーブル
- 合紙ストックテーブル
標準仕様
ラップラウンドケース専用システムで、ケース束をきれいに整列させる揃え装置と、確実に搬送することができる専用ハンドを使用しており、敷紙や天べニアもロボットで敷くことを可能にしたシステムです。
| 型式 | ラップラウンド専用 | 多丁配兼用 | |
|---|---|---|---|
| 処理能力 | ロボット最大処理速度 6動作/分 (処理枚数360枚/分 Aフルート2丁、60枚/回) (処理枚数600枚/分 Bフルート3丁、100枚/回) |
||
| 対応寸法(mm) | Min. | W400×L400 | W400×L400 |
| Max. | W1,300×L1,700 | W1,300×L1,700 | |
| 最大可搬重量(kg) | 25 | ||
| ハンドリング枚数 | Aフルート:60枚以下 | ||
| Bフルート:100枚以下 | |||
| 所要電源(KVA) | 20(標準仕様部) | ||
| エアー消費量 | 500L/mm.(0.69MPa(7kgf/cm²G)) | ||
| 適用パレット寸法(mm) | Max.W1,800×L1,500 ~ Min.W900×L600 | ||
※対応フルートは別途ご相談となります。
標準装置・機能
専用ハンド
ラップラウンドケースの特性に適したハンドを採用しております。
サーボ駆動で確実にケースを把持して、荷姿の良い整列積み上げができます。

ラップラウンド専用

多丁配兼用
ケース揃え装置
荷姿を決定するケースの揃えを、流れ/幅方向それぞれのステーションできれいに揃えることができます。

ケース揃え装置
オプション
段積み装置
Aフルート30枚パッチを60枚パッチに、Bフルート50枚パッチを100枚に段積みすることが可能です。

段積み装置
システムを構成するロボット
DANBOTのパレタイズロボットは、大動作範囲のカワサキロボットCP180Lを採用。またオプション用のロボットはスリムなボディかつ大動作範囲を確保するRシリーズを採用。

CP180L

RS050N

コントローラはE03を採用

ティーチペンダント
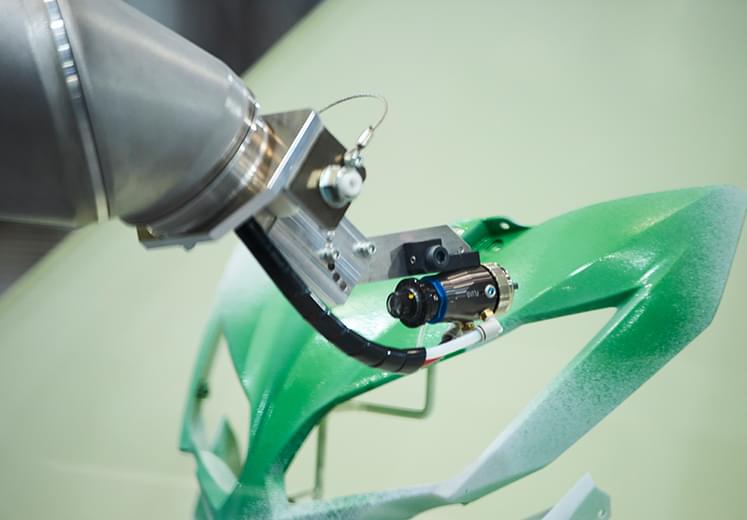
ケズルーノ
ケズルーノ
従来NC工作機械や専用機もしくは手作業で行っていたフェイス面加工を川崎重工業製ロボットとオリジナルスピンドルユニットの組み合わせで荒削りを可能とした汎用性に優れた加工用ロボットシステムです。